The Ping Sonar uses a 115 kHz transducer frequency, away from those used on most boat echosounders to avoid interference. It has a measurement range of 100 meters (328 feet) and a measurement beamwidth of 25 degrees, perfect for applications on a rocking boat or for obstacle avoidance. An advanced bottom-tracking algorithm runs on the device to determine the distance to the seafloor, even in complicated situations with multiple echoes.
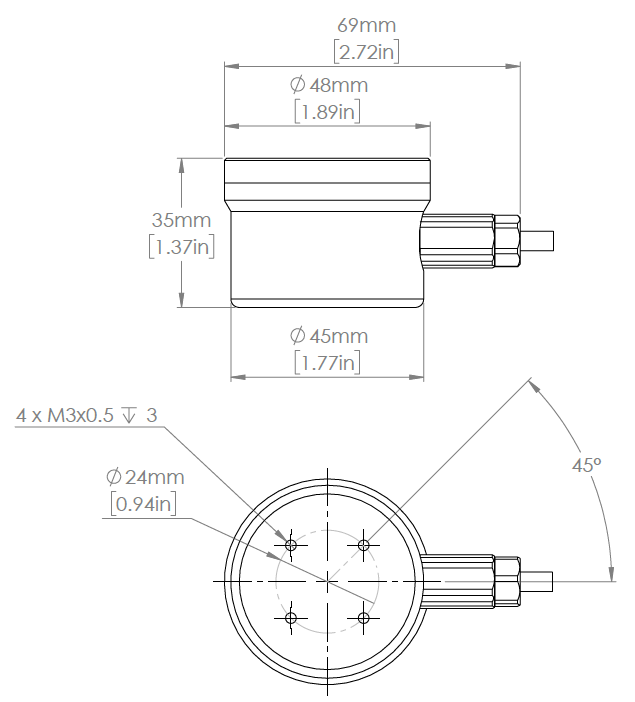
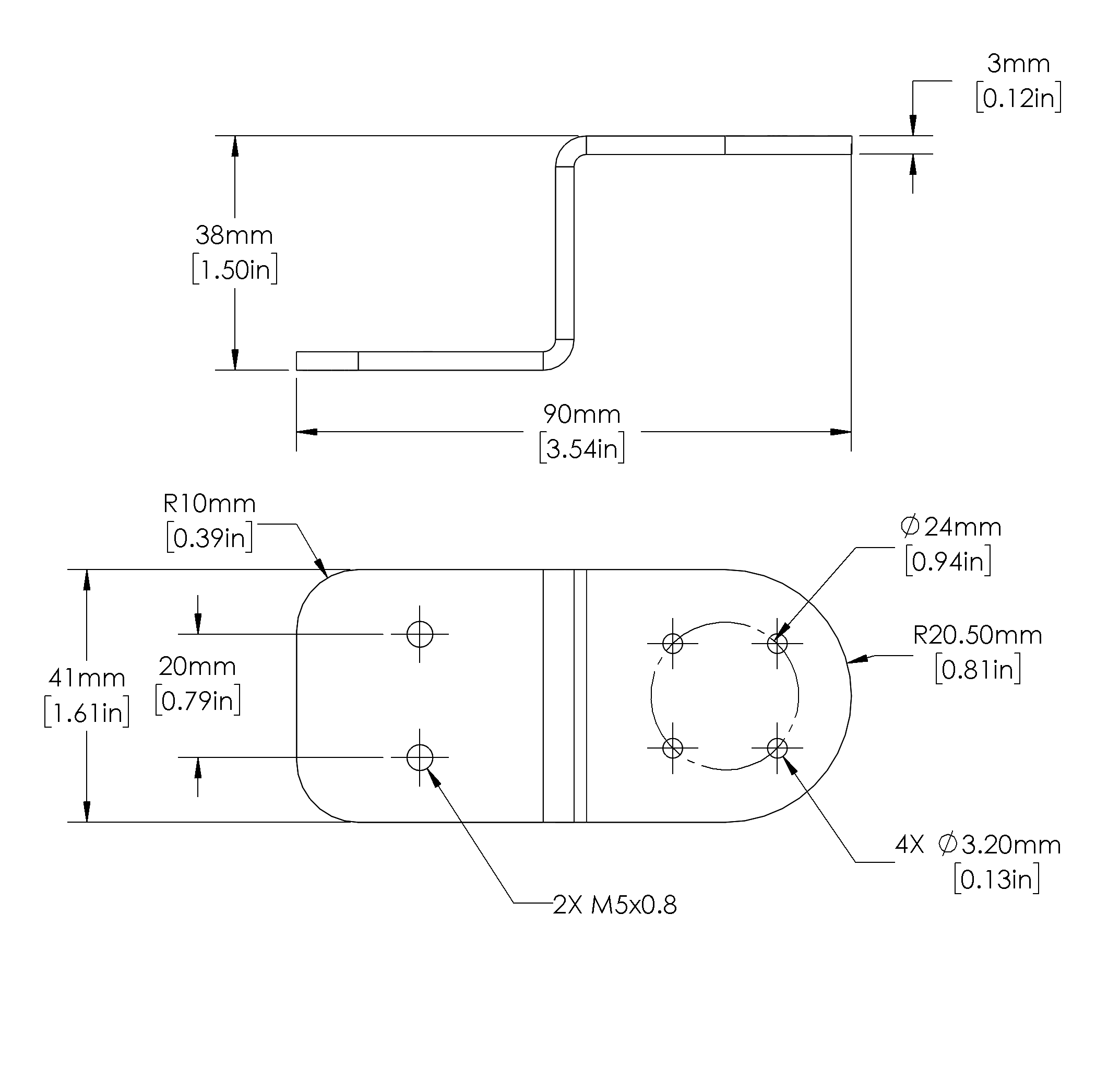
The Ping Sonar is housed in a rugged hard-anodized aluminum enclosure with a 1 meter (3.3 feet) cable and a pre-installed WetLink Penetrator. It has four threaded mounting holes and comes with a mounting bracket and hardware for easy installation on the BlueROV2. The included header pin to JST GH adapter makes it easy to plug into the USB to Serial and RS485 Adapter.
The Ping can be connected to a microcontroller device, such as an Arduino, or to a computer through a BLUART USB to Serial adapter.
Once connected, we recommend getting started with Ping Viewer, an open-source application developed specifically for Ping devices. Ping Viewer makes it easy to view the output, record data, and change settings on the Ping and runs on Windows, Mac, and Linux. The Ping Sonar can be connected to Ping Viewer directly or over a network connection routed through BlueOS, so that you can use the Ping on the ROV without using any additional wires in the tether.
For those who wish to integrate the Ping Sonar into other systems, it communicates with a binary message format called Ping Protocol. We’ve made C++, Arduino, and Python development libraries for Ping Protocol to get you up and running almost immediately.