No Products in the Cart
The Newton Gripper provides the ROV and other subsea vehicles with the ability to interact with the subsea environment to retrieve objects, attach recovery lines, or free a snagged tether!
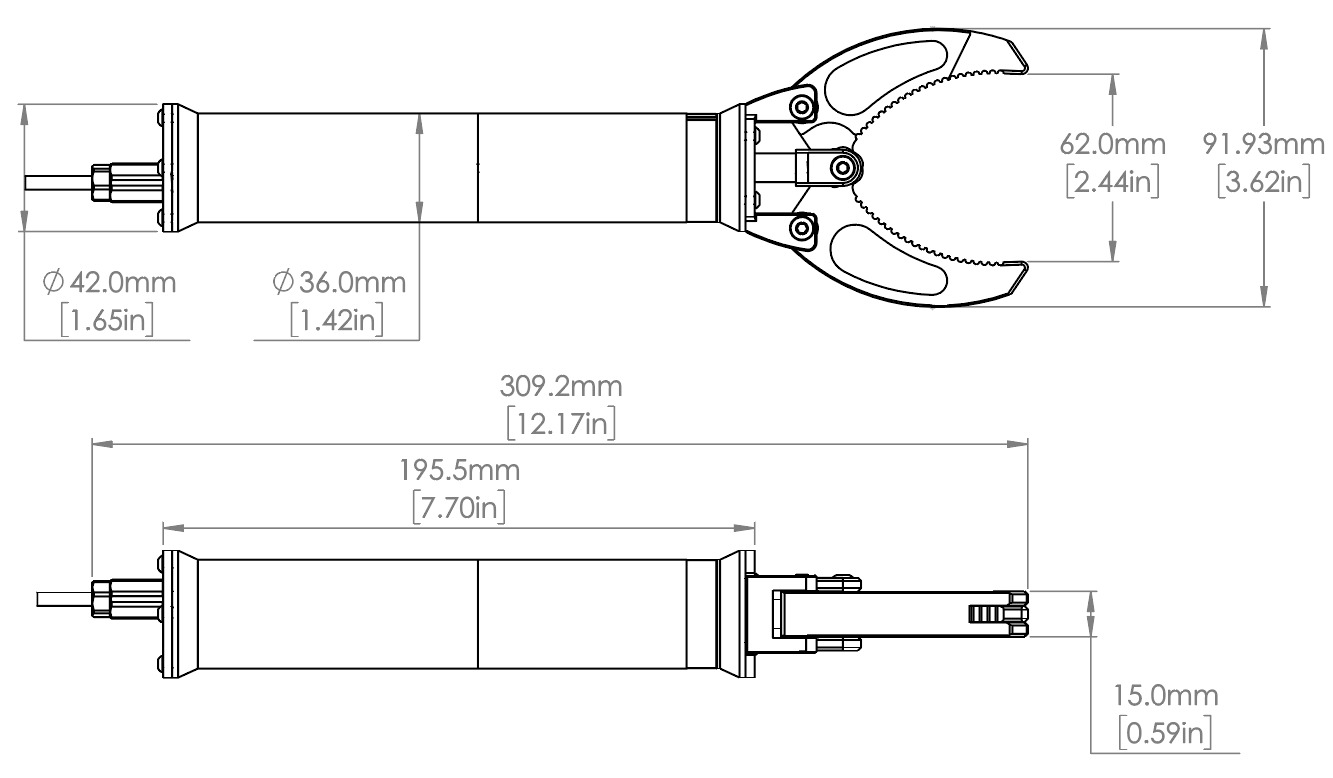
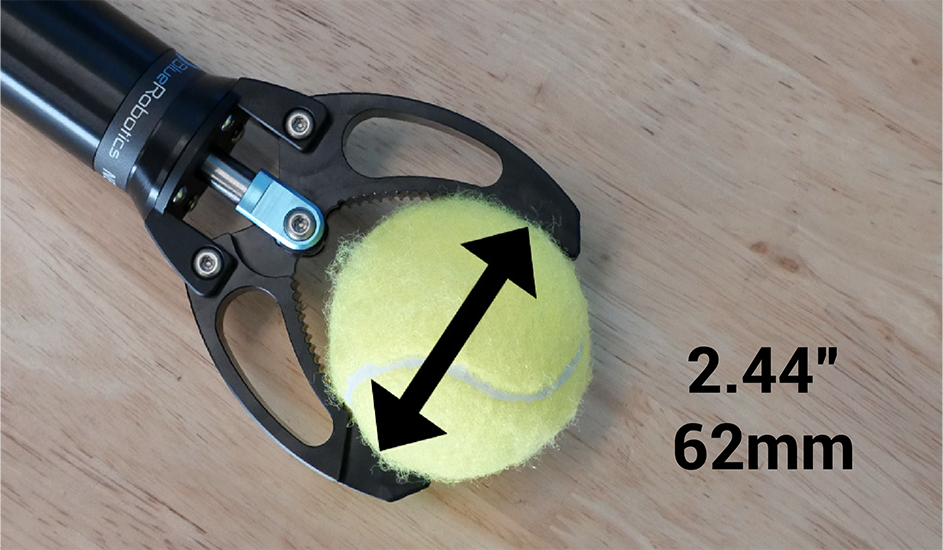
The gripper has jaws that open to grab objects up to 2.75″ or 7cm in diameter. The plastic jaws are mounted with custom aluminum screws to create a corrosion resistant mechanism that doesn’t need any lubrication. The jaws are driven by a linear actuator that uses a geared brushed motor and lead screw. The main body is air-filled and sealed with O-rings. We’ve spent a lot of time testing it at pressure and it’s rated to 300m depth with plenty of safety factor.
The motor inside is controlled by a purpose-built brushed motor controller that accepts a standard servo-style PWM signal so that the gripper can be controlled just like our thrusters and lights. Power can be provided by the same battery that drives the thrusters as the gripper is compatible with 9-18v input and draws up to 6A current. It automatically detects motor stall conditions and stops the motor so that the gripper will always stop at the right moment. Check out the launch video to see that in action!
BlueRobotics
Manipulator Tools
- Additional Attachment
- No Additional Attachment
- Newton Sediment Sampler Attachment